Description Projet
Finalité
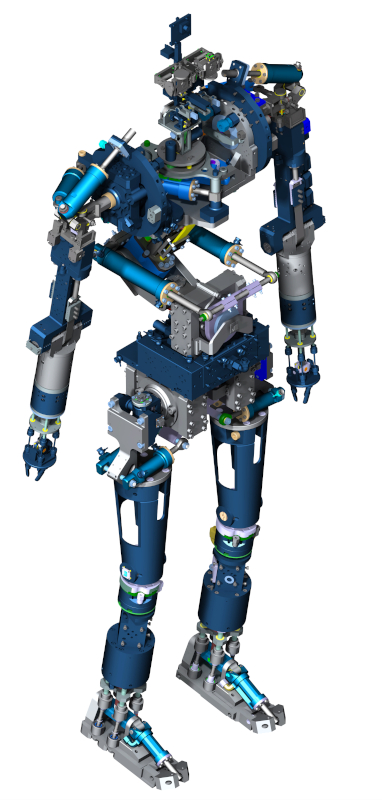
HYDROïD-II (HYDraulique et ROïD) est un robot humanoïde en taille réelle en cours de développement, qui vise à améliorer notre compréhension des phénomènes de locomotion et de manipulation chez les humains.
Les humanoïdes avec un actionnement hydraulique sont capables de réaliser des tâches difficiles et utiles, et de remplacer les humains dans des environnements de catastrophe.
Approche
L’approche de la plateforme HYDROïD-II repose sur le développement de technologies avancées d’actionnement hydraulique intégrées, visant à résoudre les limitations classiques des robots humanoïdes hydrauliques. Elle se distingue par les éléments suivants :
- Intégration Hydraulique: Contrairement aux conceptions traditionnelles qui utilisent des tuyaux externes, HYDROïD intègre des passages hydrauliques directement dans la structure du robot. Cela élimine les tuyaux externes, réduisant les risques de fuite, minimisant l’encombrement et préservant l’aspect anthropomorphique du robot. Cette approche se base sur une analogie biologique en intégrant des « artères » et « veines » internes, rappelant la circulation sanguine humaine.
- Mécanismes Hybrides Innovants: Deux types de mécanismes hybrides sont employés pour des modules clés (hanche, épaule, torse, cheville, poignet et cou). La première structure, avec un actionneur rotatif et une structure parallèle, offre deux degrés de liberté pour des mouvements complexes. L’utilisation de câbles dans la structure parallèle des modules de la cheville, du poignet et du cou apporte une flexibilité et une précision accrues.
- Actionneurs Hautement Intégrés: HYDROïD-II introduit un nouvel actionneur intégré qui assure des performances accrues. Ce type d’actionneur a été conçu pour optimiser la puissance et le contrôle du robot tout en réduisant les dimensions globales de l’appareil.
L’objectif global de cette approche est de permettre au robot HYDROïD-II d’exécuter des tâches exigeantes dans des environnements complexes, tels que des zones de catastrophe, en offrant des capacités de locomotion et de manipulation avancées et mieux contrôlées.
- Responsables scientifiques: Samer ALFAYAD (PR Univ. Évry, IBISC équipe IRA2)
- Responsable technique: Maya SLEIMAN (Ingénieure de Recherche, IBISC/KALYSTA)
