Description Projet
Contexte
Ce projet s’inscrit dans le cadre de l’axe de recherche du laboratoire IBISC sur la médecine personnalisée. Il vient en
soutien au projet de recherche VR-Skills Lab, cofinancé par Genopole dans le cadre de l’appel à projets pour équipements
semi Lourds 2015, et dans le cadre de la thèse de Mlle Aylen Ricca, financée par un contrat doctoral de l’Université Paris
Saclay (début Oct. 2016). Les partenaires de ce projet pluridisciplinaire sont le laboratoire IBISC (UEVE), le Centre
Hospitalier Sud Francilien (CHSF), le laboratoire IRCCyN (Ecole des Mines de Nantes), et le laboratoire EREL (Wright
State University, Etats-Unis).
Objectifs scientifiques
Les simulateurs chirurgicaux basés sur les technologies de la réalité virtuelle permettent d’améliorer de façon
significative la formation des chirurgiens [4]. Ces outils permettent la formation des compétences techniques et
psychomotrices nécessaires pour leurs tâches (ex. maniement des instruments, confection des nœuds, dissection de
tissus). Cependant, il y a actuellement un manque de lignes directrices pour définir les niveaux appropriés de fidélité
d’interaction pour ces systèmes. Dans ce contexte et dans le cadre du projet HIFI-VR, nous envisageons d’étudier la
fidélité des interactions haptiques pour la conception d’un laboratoire virtuel de simulation chirurgicale permettant aux
praticiens de se former d’une manière immersive à maîtriser les compétences chirurgicales techniques.
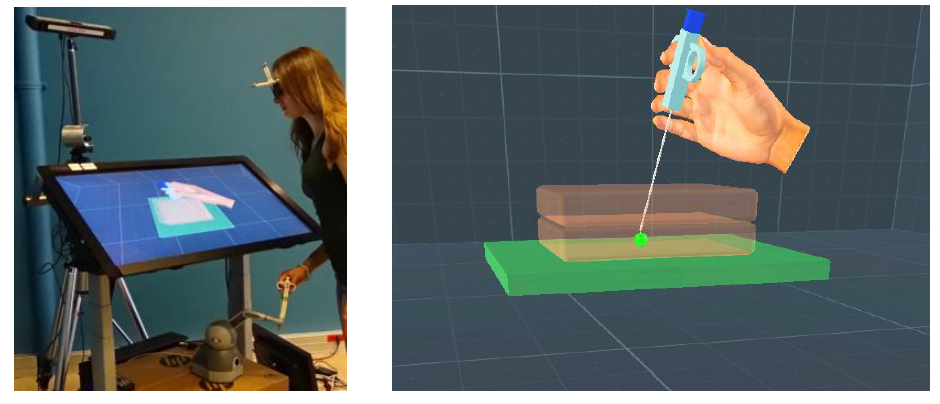
Pour atteindre cet objectif, la première étape était de concevoir un outil d’apprentissage des gestes techniques.
Pour ce faire, nous avons d’abord choisi une tâche chirurgicale cible : insertion d’aiguille pour effectuer une biopsie en
radiologie interventionnelle. Nous avons par la suite modélisé l’environnement virtuel d’apprentissage qui comprend
notamment les outils chirurgicaux ainsi que les objets et organes cibles (figure 1) ainsi que son interface physique.
Ensuite, nous avons conçus des techniques d’interaction pour la navigation dans l’environnement virtuel [5] qui
permettent à l’apprenant d’accomplir correctement sa tâche. Enfin, nous avons réalisé une étude expérimentale pour
évaluer notre système. Les résultats ont montré qu’une technique de navigation naturelle, basée sur le suivi de la position
de la tête de l’utilisateur est la mieux adaptée pour réaliser cette tâche [5]. Cependant, l’évaluation a permis également
d’identifier un certain nombre de limitations du système, liées notamment au manque de fidélité de l’interface haptique.
En effet, l’interface haptique utilisée ne permet d’avoir qu’un retour de force sur 3 degrés de liberté (DDL) ce qui impacte
l’expérience utilisateur lorsqu’il manipule l’aiguille et interagit avec l’environnement virtuel. Pour pallier ce problème,
nous avons proposé un modèle pour l’évaluation de la fidélité haptique pour un simulateur chirurgical [4]. Le projet HIFIVR vise donc à valider ce modèle à travers des études expérimentales. Notre demande dans le cadre de ce projet porte
donc sur l’acquisition d’une nouvelle interface haptique à 6DDL permettant d’améliorer la fidélité de l’interaction de
l’utilisateur avec l’environnement virtuel.
- Porteur du projet: Amine CHELLALI (MCF Univ. Evry)
- Début du projet: janvier 2017
- Durée du projet: 1 an
- Montant approximatif: 25 Keuros
- Plate-forme concernée: EVR@
- Equipement visé: Bras à retour d’effort 6 ddl