Project Description
The EVR@ (Environnements Virtuels et de Réalité Augmentée – Virtual and Augmented Reality Environments) technology platform, inaugurated in May 2004 in the presence of representatives of its various funding bodies (UEVE, Conseil Général de l’Essonne, CNRS), is the Virtual and Augmented Reality platform of the Université d’Evry Val d’Essonne; it is also one of the 22 technology platforms and technical platforms referenced by Genopole ®. EVR@ is fully in line with the UEVE’s essential missions: research, teaching and promotion to a wide public (researchers, industrialists, students, high school students and families).
- Scientific directors: Malik MALLEM (Full professor), Samir OTMANE (Full professor)
- Technical manager: Frédéric DAVESNE (Research Engineer)
- WEB site (old stuff): http://evra.ibisc.univ-evry.fr
- Reference document
- Related publications
- YouTube channel
- EVR@ demonstrations (2018 stuff)
- EVR@ related projects
Current EVR@ materials
Virtual and Augmented Reality headsets
- METAQuest3
- VARJO-VR3
- HP Reverb G2
- Hololens 2
- Oculus Quest2
- Oculus Rift-S
- HTC Vive Pro
- HTC Vive Pro Eye
- Oculus DK2
, 2021")
, 2015")
, 2021")
, 2024")
, 2020")
, 2023")
, 2019")
, 2022")
, 2019")
, 2019")
EVR@ platform – Force feedback and tactile systems
- Phantom Omni 3ddl
- Haption Viruose 6ddl
- Gilet haptique Skinetic
- Gants de données Hi5 VR Glove

, 2017")
, 2018")
, 2022")
")
EVR@ immersive platform, MOBILYZ system, REALYZ company, 2015-




EVR@ platform – Infrared tracking systems and reflective balls
- Système SMARTTrack3, A.R.T. (EVR@-Robotique)
- 4 caméras OPTITRACK, Natural Point (EVR@-Immersif)
, 2020")
EVR@ Platform – Inertial tracking system
- MVN-AWINDA system, XSens, 17 acceleration sensors, distributed over body joints, with MVNS-BIOM-L-D tracking software – MVNStudio BIOMECH Lifetime, 2017.

EVR@ platform – Humanoid robotics, 2012 academic project-

EVR@ platform – GLISS4ALL academic project
- Robot assembled at UFR Sciences et Technologies, Univ. Évry
EVR@ platform – Arm robotic systems
- FANUC LRMate 200iB robot (2012)
- MECA 500 robot (2022)
")
")
History of the EVR@ platform
Before EVR@ … ARITI project,(1997-2003)
")
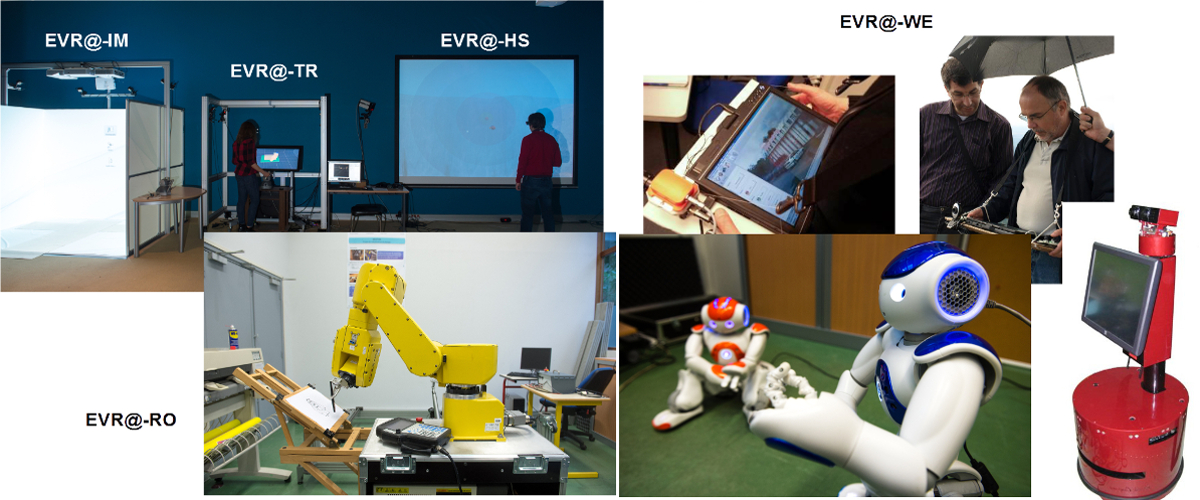
EVR@ Human-Scale platform (2004-2007)
- Active HD stereoscopic visualization by rear projection on a 3.2m x 2.4m semi-transparent screen.
- Hand and head tracking using 2 ARTRACK1 IR cameras coupled with A.R.T.’s DTRACK1 software and two Flystick1.
- VIRTOOLS software development platform



")

EVR@ Human-Scale Platform and EVR@ Transportable Platform (2008-2013)
- Addition of a second node (transportable system) to test collaborative 3d interaction models.
- Addition of Human-Scale effort feedback using the SPIDAR system.
VIRTOOLS software development platform

")
")
EVR@ platform – Multi-touch system, IRMBio Genopole 2011 project


EVR@ platform – Robotics (1997-2013)
- 5ddl calibration bench, LSC laboratory, ARITI project slave site
- FANUC LRMate 200i robot, ARITI project slave site
")
")


EVR@ Platform – Underwater Robotics, ANR projects DIGITAL OCEAN (2006-2009) and DIGITAL OCEAN EU (2011-2012)
- DOLPHYN visualization system, in collaboration with ARIPA, UFR-ST, Univ. Évry and project partner VIRTUAL DIVE.
- mini-ROV, SUBSEA TECH


")
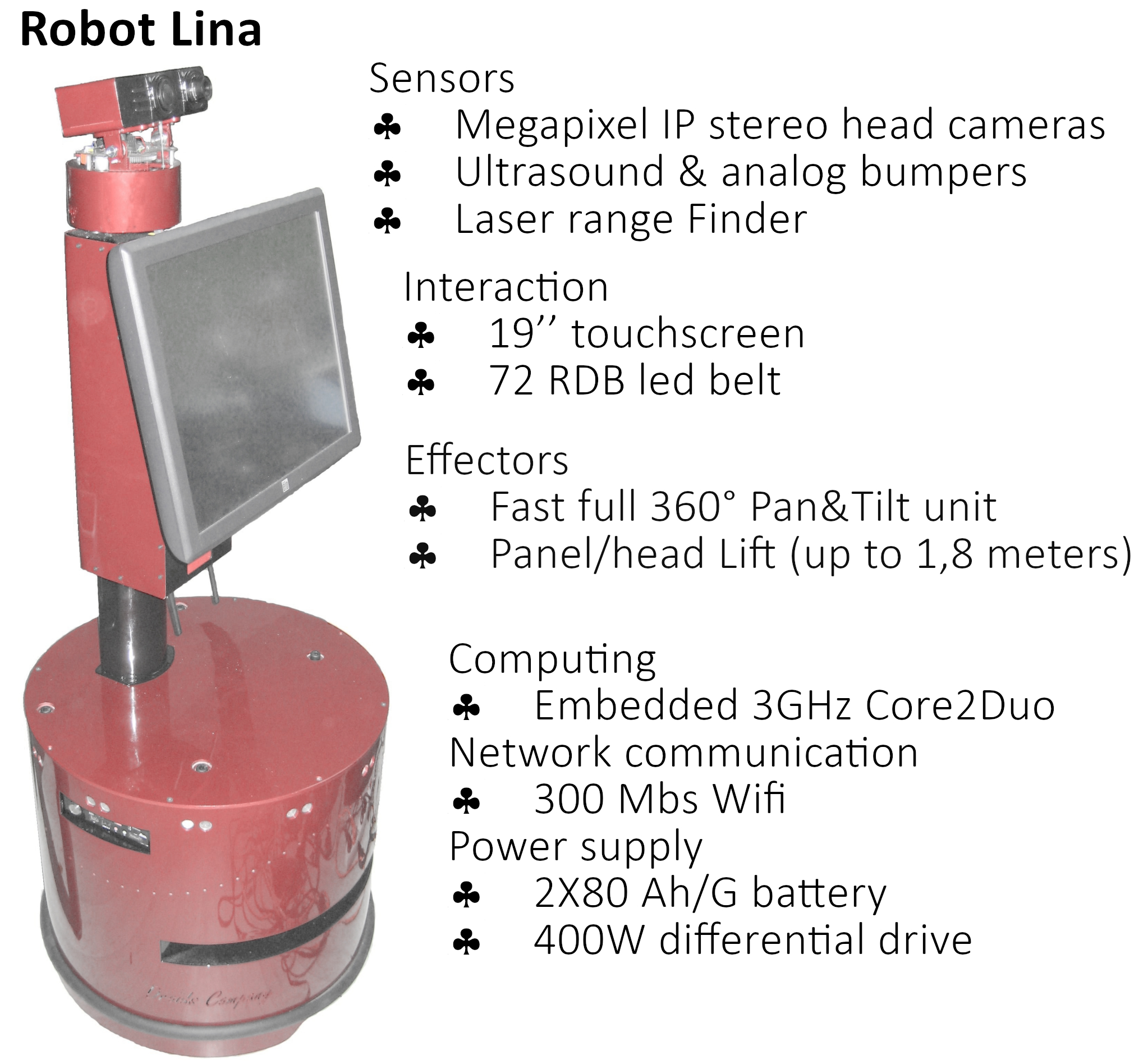
EVR@ platform – Mobile robotics (1998-2020)
- ARPH robot with MANUS arm
- LINA robot,
, Contrat AFM 1998-2000")
, projets Techsan Quovadis et EU FP7 Companionable 2009_2012")


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment